

Nach längerer Bauzeit hatte ich nun endlich meine
„Käsefräse" fertiggestellt und sie wartete nun
dringendst darauf getestet zu werden. Allerdings hatte
ich modellbautechnisch im Moment nichts in der
Pipeline was hätte gefräst werden müssen. Also griff ich
eine Idee wieder auf, die ich schon beim Bau meines
Forschungsubootes hatte, einen
Schlauchpumpenkolbentank. Genau das richtige
Projekt, um mich mit meiner neuen Fräse und deren
Software vertraut zu machen. Ich hatte mich damals für
meinen Entwurf des Doppelkolbentanks entschieden
und die Idee mit dem Schlauchpumpenkolbentank
nicht weiter vertieft. Also recherchierte ich ein wenig im
Internet und informierte mich über den Aufbau und die
Funktionsweise verschiedener Schlauchpumpen. Vom Prinzip her sind sie alle gleich aufgebaut,
ein Schlauch wird zusammengepresst und drückt das Wasser im inneren des Schlauches vor sich
her. Ein einfaches aber geniales System was auch in der
Medizintechnik eingesetzt wird, wo es ja
bekanntermaßen auf hohe Präzision bezüglich der zu
fördernden Menge ankommt. Bevor ich mich nun
weiter mit der Konstruktion beschäftigte schaute ich
erst einmal im Bastelkeller nach, was ich noch an
Material zur Verfügung hatte. Da es sich ja nur um
einen Testtauchtank handeln sollte, wollte ich die
Materialkosten möglichst gering halten. Bis auf die
passenden 0-Ringe fand ich auch alles was ich zum Bau
der Pumpe benötigte, eine alte Bildtrommel aus einem
Kopierer sollte als Zylinder dienen, 10 mm Hart-PVC in
Grau für das Schlauchpumpengehäuse und die Kolben,
sowie ein Getriebemotor für den Antrieb der Pumpe.
Die Konstruktion
Der Kolben
Der Kolben wird im späteren Betrieb ja nur durch den
Wasserdruck im Zylinder hin und her bewegt. Er wird also
nicht durch eine Kolbenstange geführt. Deshalb sollte er so
konstruiert sein, das er nicht verkannten kann. Ich habe das
so gelöst, dass ich ihn mit zwei 0-Ringen versehen habe, die in
einem gewissen Abstand zueinander sitzen und somit eine
gute Führung gewährleisten sollten. Da auch hier meine Fräse
zum Einsatz kommen sollte habe ich ihn aus zwei Einzelteilen,
wie auf dem ersten Bild zu sehen gefertigt. Nut und Zapfen
dienen später zum passgenauen Verkleben der beiden Teile.
Die Nuten für die 0-Ringe habe ich vor dem Verkleben auf der
Drehbank eingestochen. Nach dem Verkleben folgte dann der
Test im Zylinder per Hand. Der Kolben ließ sich mit einem
Finger gut im Rohr hin und her bewegen. Da das Ergebnis
sehr zufriedenstellend war konnte ich mich nun dem Pumpenrad zuwenden.
Das Pumpenrad
Das Pumpenrad der Pumpe besteht aus 11 Einzelteilen und wird genau wie der Kolben auch an
Nut und Zapfen verklebt. In die drei Laufräder habe ich nach dem Prinzip des Gleitlagers kleine
Messingrohrstücke eingepresst, die nachher auf 3mm V2A Stifte laufen sollen, die wiederum beim
Zusammenbau des Pumpenrades die das Laufradgehäuse eingepresst werden. (siehe Bild2).
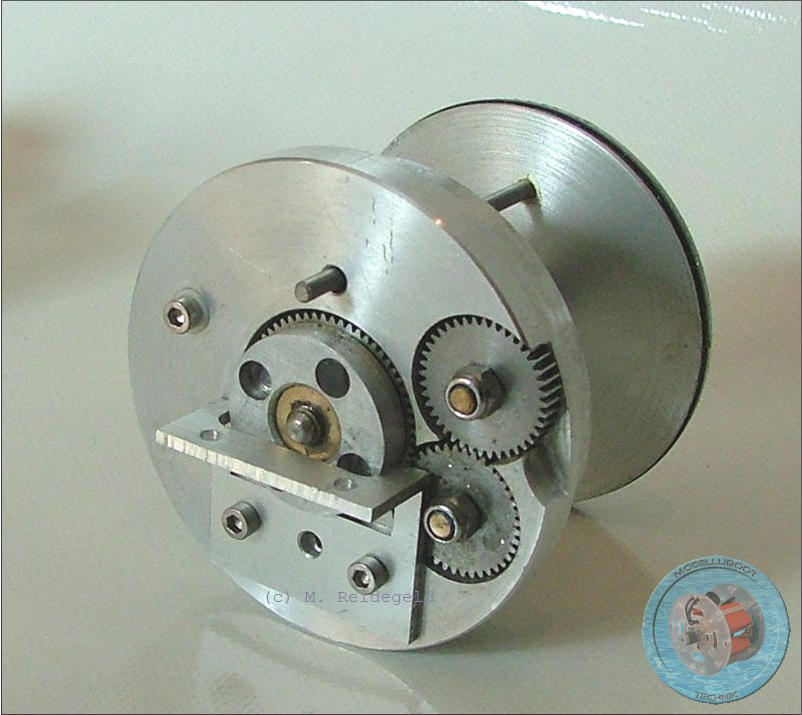
Das Pumpengehäuse
Die Baugruppe des Pumpengehäuses fertigte ich aus drei Einzelbauteilen, den Grundkörper,
welcher zur Aufnahme des Getriebemotors und des Laufrades dient, dem Pumpendeckel und
einem Anschlussflansch für den Zylinder. Wie auf dem Bild 3 zusehen wird der Silikonschlauch
von unten zugeführt, verläuft dann durch die Pumpe am Laufrad vorbei und tritt dann unten auch
wieder aus dem Gehäuse heraus. Angeschlossen an den Kolbentank wird der Schlauch dann an
der gegenüberliegenden Seite der Schlauchpumpe.
Die fertige Pumpe
Beim Zusammenbau der Pumpe stellte ich fest, dass die Ausrichtung des Getriebemotors noch
nicht korrekt war und das Laufrad der Pumpe noch am Gehäuse schleifte. Die Lösung des
Problems war ein Adapterflansch zwischen Getriebemotor und Gehäuse. Das Laufrad konnte sich
nun frei bewegen und einem Probelauf stand nichts mehr im Wege. Beim Trockenlauf stellte ich
dann noch fest, dass mein Silikonschlauch etwas im Gehäuse wanderte und ich ihn an den
Austrittsöffnungen am Gehäuse noch fixieren musste, damit er mit der Zeit nicht ganz durch das
Gehäuse wandert.
Fazit:
Jedes Tauchtanksystem hat seine Vor- und Nachteile.
Vorteile der Schlauchpumpe sind sicherlich die genaue
Dosierbarkeit und für manche Modelle vielleicht sehr
wichtig, es gibt keine Ausfahrbahren Teile die den
Einbau anderer Bauteile behindern könnten.
Als Nachteil sehe ich im Moment noch die
Flutgeschwindigkeit, die finde ich, ist bei den ersten
Tests noch sehr langsam. Allerdings hatte mein
Versuchsmotor auch nur eine sehr geringe Drehzahl.
Da geht sicherlich noch was…..





Die 210 TR soll mit einem Doppelkolbentauchtank, wie ich ihn
schon in der Delta einsetze ausgerüstet werden. Der Grund der
mich damals beim Bau meiner Delta zum Entwurf eines
Doppelkolbentauchtanks bewogen
hat waren die Platzverhältnisse im
Druckkörper der Delta. Die fixe
Schwerpunktlage eines solchen
Systems stand damals ehr im
Hintergrund. Bei einem normalen
horizontal eingebauten Tauchtank
mit einem Kolben wandert der
Schwerpunkt je nach Stellung des Kolbens zum Bug oder zum
Heck. Was eine Änderung der Trimmlage zur Folge hat. Um diese
Schwerpunktverlagerung zu kompensieren sind mehr oder wenig
komplizierte Eingriffe wie das Verschieben des Tauchtanks,
Verfahren von Trimmgewichten oder ähnliche Aktionen
erforderlich, um das Boot wieder in die ausgetrimmte Lage
zurückzubringen. Beim Doppelkolbentauchtank entfallen diese
zusätzlichen Eingriffe, da sich die
Schwerpunktlage beim Betrieb des
Tauchtanks nicht verändert. So
gesehen relativiert sich der
Mehraufwand beim Bau eines
Doppelkolbensystems recht schnell.
Da die 210TR mit einer statischen
Tiefenregelung ausgestattet werden soll habe ich den
Doppelkolbentank für unser Gemeinschaftsprojekt 210 TR ein
wenig modifiziert. Um möglichst wenig Luft ins System zu
bekommen, habe ich in der Mitte des
Tanks einen Flutspant eingefügt. An diesen Spant sind auch die
Anschlüsse zum Fluten bzw. Lenzen angebracht. Bei den
Vorgängermodellen konnten die beiden Kolben sich nur bis zum
vollen Zuleitungsdurchmesser annähern, was Lufteinschlüsse im
System zufolge hatte. Bei meinem neuen Entwurf fahren die
Kolben bis stramm an den Flutspannt
und der Lufteinschluss wird somit
minimiert, was sich vorteilhaft auf die
statische Tiefenregelung auswirken
dürfte. Eine weitere Neuerung ist auf
Grund der Größe des Tanks der zwei Motoren-Antrieb. Die beiden
Motoren sind an Kolben Nummer 1 angeflanscht und wie beim
Vorgängermodell wird Kolben Nummer 2 über eine Hilfswelle mit
angetrieben. Da Kolben Nummer 2 ja nur ein Mitläufer ist werden
Endabschaltpunkte nur an Kolben Nummer 1 erfasst. Die
Positionsbestimmung der Kolben im Tauchtank erfolgt über eine
Polscheibe am Getriebe des zweiten Kolbens. Da die Spanten des
Bootes wie schon angesprochen aus satiniertem Acrylglas
gefertigt werden sollen und der Tauchtank in das Spantengerüst
integriert wird werden einige Teile des Tanks auch aus Acrylglas
bzw. Polycarbonate gefertigt. Als Druckrohr für unseren Tank
dient uns eine ausgediente Bildtrommel aus einem Kopierer. Das
Getriebe besteht wie bei den
Vorgängern auch wieder aus
Stahlzahnräder Modul 0,5 und ist so
ausgelegt, das uns für die statische
Tiefenregelung eine maximale
Flutgeschwindigkeit von 10 ml/s zur Verfügung steht. Die
Tauchtankspanten mit dem Getriebe sind, wie alle anderen
Spanten auch auf dem Computer gezeichnet und anschließend auf
der CNC-Fräse weiterverarbeitet worden. Der Tauchtank wird, wie
die Antriebssektion auch nur Verschraubt bzw. gesteckt und ist in
sämtliche Teile zerlegbar.









Bild links: Die beiden Versionen des
Doppelkolbentauchtanks. Im Hintergrund
der 1 Tauchtank (Delta). Im Vordergrund
die neue Version.
Bild links: Das in den Deckel integrierte
Getriebe mit aufgepresster
Magnethalterung.
Bild links: Die einzelnen Komponenten
des Doppelkolbentauchtanks.
Bild links: Die beiden Kolben mit
Hilfsstangen des DKTT
Bild links: Tauchtankrohr mit Anschluß
zur Wasseraufnahme und Lagerböcke für
die Hilfswelle.
optimiert ab
1280 x 768